Vehículos: ASV, AUV, ROV y otros
Con el término genérico ‘vehículos’ hacemos referencia a una serie de robots, autómatas y máquinas que disponen de sistemas propios de propulsión y no requieren de un operador a bordo. En este artículo sólo abordamos algunos de los que se utilizan en aguas costeras y oceánicas para inspección, observación o medida en el medio marino, […]
Con el término genérico ‘vehículos’ hacemos referencia a una serie de robots, autómatas y máquinas que disponen de sistemas propios de propulsión y no requieren de un operador a bordo. En este artículo sólo abordamos algunos de los que se utilizan en aguas costeras y oceánicas para inspección, observación o medida en el medio marino, o acuoso, en general.
Clasificación
Los vehículos autónomos de uso marino se pueden clasificar en función de diversos criterios. Por nombrar los dos más relevantes, usaremos las tres clasificaciones siguientes:
- Rango de profundidad: superficiales, someros (50-100 metros), de plataforma (200-300 m) o de aguas profundas (1.000-2.000 m) e incluso ultraprofundas (que pueden alcanzar 6.000-9.000 m)
- Uso de cables: cableados (hasta la consola del operador), autónomos (preprogramados y/o reprogramables en remoto) e híbridos (con ambas habilidades)
- Grado de libertad: cautivos (amarrados a un muerto) y libres (con o sin navegación preestablecida)
Vehículos Autónomos de Superficie
Los vehículos autónomos de superficie, también llamados ASV (Autonomous Surface Vehicle) o USV (Unmaned Surface Vehicle) están destinados a aquellas tareas que no requieren de inmersión para desempeñar sus funciones con total solvencia. Las tareas que se le encargan van desde la observación de las condiciones meteorológicas y superficiales en el mar (de difícil observación por otros métodos) hasta las observaciones y medidas de las capas superficiales (mediante sensores acústicos como sondas de barrido lateral o sondas multihaz). Algunos USV pueden llevar un pequeño chigre para largar y cobrar sondas multiparamétricas o tomar muestras de agua a diferentes profundidades. Su autonomía es de unas pocas horas, por lo que es conveniente disponer de dos paquetes de baterías recargables para intercambio inmediato durante una campaña de campo.
Las dimensiones de los USV van desde un metro escaso (GPAseabots, por ejemplo) hasta embarcaciones de porte mediano capaces de realizar trabajos más exigentes. Se trata, probablemente, de la categoría más dinámica dentro del sector, con un gran número de fabricantes ofreciendo diversidad de aplicaciones.
La navegación sin cables se realiza mediante posicionamiento GPS y una ruta prefijada o bien mediante control remoto, vía radio, normalmente. Aunque disponen de habilidad de navegación autónoma, siempre es posible tomar el control por parte del operador, en forma remota, vía radio
La arquitectura de los USV se basa en los siguientes sistemas:
- Sensores para la percepción de su entorno, que forman el sistema de navegación
- Sistema de guiado, para poder seguir una trayectoria
- Módulo de gestión y control, formado por el sistema de navegación y el de guiado
- Sistema de planificación dinámica, que sería el más importe, ya que dota al USV de autonomía para responder ante situaciones cambiantes del entorno, como puede ser la evasión de obstáculos, sin intervención humana.
El mercado nos ofrece gran cantidad de modelos, dependiendo de nuestras necesidades, tanto para aplicaciones comerciales y científicas, como militares.

Vehículos autónomos subsuperficiales (AUVs, gliders y trepadores)
Los Autonomous Underwater Vehicles (AUV) están diseñados para navegar sumergidos y su uso esencial es para monitoreo, investigación y defensa. Una vez programada la ruta deseada, se propulsan en el agua mediante motores o por el ajuste de su densidad (con un mínimo consumo de energía) para muestrear de modo autónomo. Dentro de esta categoría hemos incluido a las boyas perfiladoras autónomas, las cuales realizan trayectos verticales hasta 6.000 metros de profundidad para el muestreo de una amplia gama de variables en la columna de agua, sin capacidad de navegación autónoma, ya que derivan con las corrientes.
Sus dimensiones van desde uno hasta varios metros. Sus rangos de trabajo alcanzan miles de metros. Los planeadores (comúnmente llamados glider) son particularmente interesantes puesto que son capaces de realizar singladuras de miles de kilómetros, con unas pocas paradas de mantenimiento debidas principalmente a la bioacumulación o necesidad de rebaterización.
Los vehículos autónomos submarinos, AUVs, no requieren de conexión física con la superficie y pueden recorrer grandes distancias gracias al uso de un sistema de navegación autónoma, un procesador a bordo (al contrario de los ROVs, que carecen de él) y la energía proporcionada por baterías internas. Para este tipo de vehículos, la optimización de la forma es esencial, ya que permite ahorrar energía y a su vez determina sus límites de operatividad.
Existe una gran variedad de vehículos subacuáticos, AUV, lo cual está motivado por su versatilidad y la gran diversidad de la demanda del mercado. Industrias como la extractiva (petróleo, minería o gas), requieren un exhaustivo conocimiento del fondo marino antes de poder construir infraestructuras submarinas, y tienen que inspeccionar tuberías y cables submarinos regularmente. Otras industrias como la naval o la pesquera también necesitan inspeccionar el estado de hélices, redes, etc. Los AUV son una herramienta perfecta para dar una respuesta eficaz a estas necesidades, abaratando los costes de operaciones de monitorización, inspección, mantenimiento y levantamiento hidrográfico.
La investigación científica hace uso de los AUV para llegar allí donde otras herramientas no llegan, como las embarcaciones de calado superior al requerido en ciertas zonas. Otro motivo por el uso científico de los AUV es su facilidad para cubrir ágilmente zonas de estudio de un modo muy detallado, pudiendo repetir la ruta periódicamente. Los AUV científicos se pueden dotar de infinidad de sensores ópticos y acústicos, correntímetros, sondas multiparamétricas (CTD), sondas multihaz, sensores de gases disueltos, pH, entre otros muchos. Todo esto permite realizar muestreos de agua y sedimentos, evaluación ambiental, describir fondos submarinos, mapearlos, fotografiarlos y grabarlos en vídeo, muestrear icebergs…
La Armada es otro sector que utiliza AUV, y lo hace con fines de vigilancia y reconocimiento, medidas contraminas, inspecciones, preparación o ejecución de actividades de rescate y salvamento.
Desgraciadamente, los AUV también han sido usados para llevar a cabo actividades ilícitas, conociéndose ya de casos en los que se han utilizado para el tráfico de sustancias ilegales.
El AUV a escoger dependerá de la función a realizar: no es lo mismo un pequeño AUV comercial para un rango de 50 m que uno científico, militar o industrial, con intereses a varios Km de profundidad.
En esta categoría hemos incluido los gliders (planeadores submarinos), que, con varios centenares de unidades suministradas, los convierten en el AUV más popular. Presentan unas características especiales, que les permiten realizar misiones en modo autónomo -sin consumo apreciable de energía- durante muchas semanas o incluso meses. El más popular de los gliders es el Slocum, de Teledyne Webb Research, que ya va por la tercera generación (G3). Este vehículo se compone de cuatro módulos (también llamados bahías) con funciones específicas: sensores húmedos y ayudas a la recuperación (proa), toma de datos (bahía científica), navegación, comunicaciones y flotabilidad (popa). Otros modelos, como son el Seaglider o el SeaExplorer, presentan una estructura monocasco, lo cual puede condicionar la capacidad de los usuarios para operar el vehículo.

Los Gliders requieren de flotabilidad neutra (con reservas de flotabilidad positiva y negativa) y de un mecanismo de alteración de la flotabilidad. Una vejiga conectada a un reservorio de aceite, activada mediante una bomba, permite trasvasar a deseo el fluido entre el reservorio rígido y la vejiga flexible. Estos tránsitos de aceite aumentan o disminuyen la densidad total del vehículo que, junto con las alas de estabilización, le permiten sumergirse o aflorar a conveniencia. Gracias a sus alas, el vehículo navega de manera estable, permitiendo la toma de datos en total silencio acústico y electrónico. La información relevante se envía mediante satélite (en las sucesivas afloraciones) al operario, para la toma de ulteriores decisiones. Esta forma de navegación supone un gran ahorro de energía ya que las baterías internas se dedican -casi- exclusivamente a los sensores y a los sistemas de navegación.
Los pilotos de gliders pueden manejar su flota de forma conjunta a través de un software específico, adecuando la ruta y otros parámetros a los objetivos de la misión.
Al igual que en otras tecnologías, la presente década está viendo nuevos fabricantes que ofrecen planeadores de pequeño porte, manejables desde embarcaciones neumáticas, con un rango acotado de profundidad y capacidad sólo para dos o tres sensores, como es el OceanScout, de Hefring Engineering.

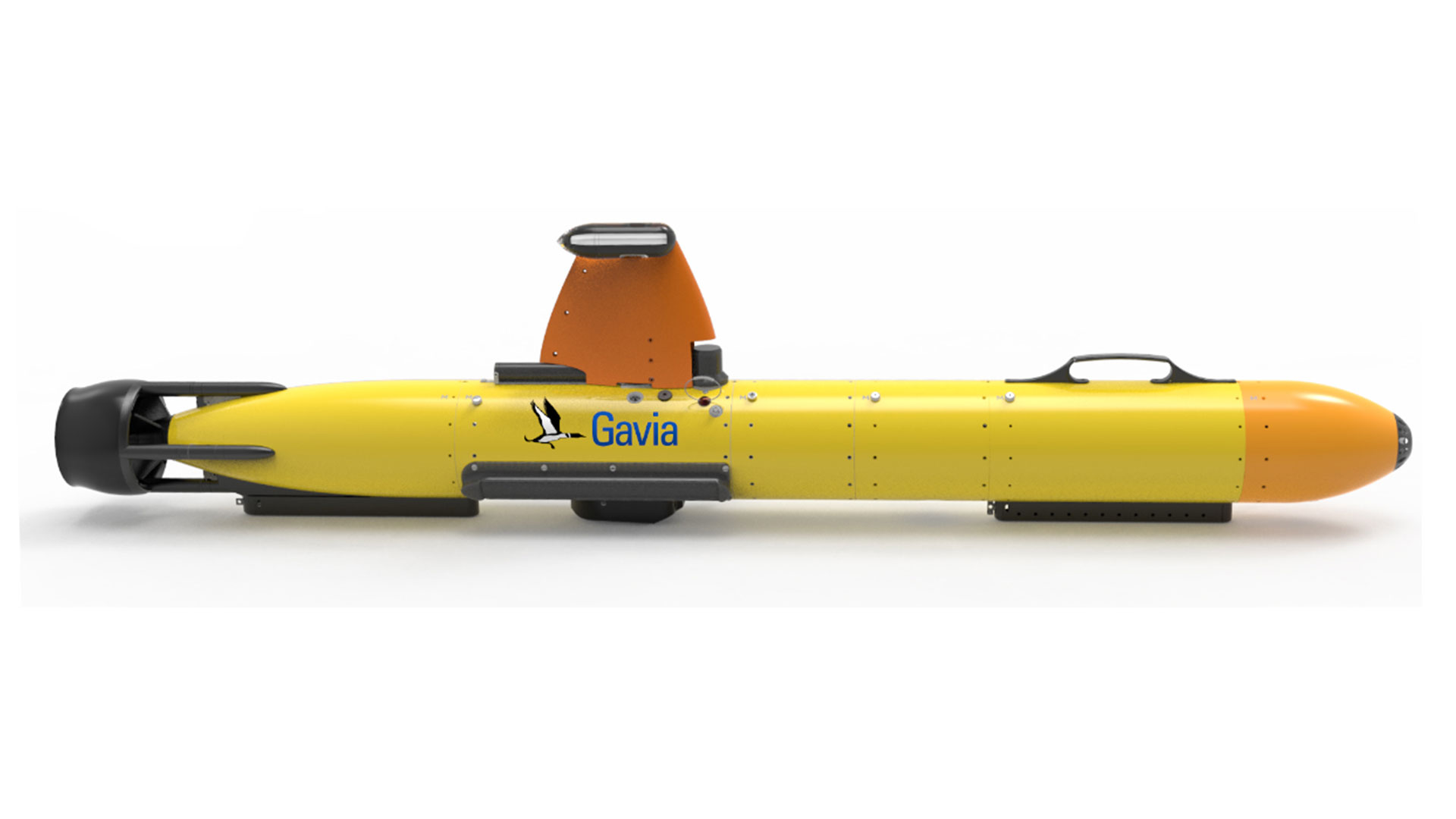
Otro ejemplo de AUV bien conocido en el mercado son los AUV Gavia, de la empresa islandesa Teledyne Gavia. Ofrecen vehículos adecuados a las tres aplicaciones predominantes: comercial, científica y militar. Una de las principales características del Gavia es su modularidad: partiendo de un modelo base, el vehículo se puede equipar dependiendo del uso que vaya a tener. Además, los módulos se pueden intercambiar fácilmente en minutos. En este enlace, se detallan sus posibles configuraciones.

En el extremo opuesto de los AUV de grandes prestaciones (de gran tamaño, capacidades y coste), se encuentran los micro-AUV: vehículos autónomos más pequeños y económicos, que sin embargo no renuncian a una gran versatilidad. Los avances tecnológicos y el abaratamiento de los materiales y procesos de producción han hecho posible el nacimiento de este nuevo segmento de AUV, compuesto por vehículos económicos, de fácil uso y transporte. Un buen ejemplo de ello es el YUCO del fabricante Seaber.

YUCO es un AUV compacto, fácilmente transportable por 1 sola persona y de diseño modular, disponible en 5 versiones cuya configuración está orientada a una aplicación específica: medidas CTD (YUCO-CTD), monitorización de la calidad del agua (YUCO-PHYSICO), levantamiento hidrográfico (YUCO-SCAN), monitoreo acústico pasivo (YUCO-PAM) y un 5º modelo de configuración abierta a la integración de los sensores del usuario (YUCO-CARRIER). Se trata pues de un nuevo concepto de AUV, de bajo coste y muy especializado.
Existen otros vehículos autónomos que navegan a la deriva, como son los perfiladores autónomos. Estos pioneros de la robótica marina miden variables oceanográficas en perfiles verticales hasta los 2.000 y 6.000 m de profundidad, y cuando están en superficie envían los datos vía satélite, ya sea mediante la red ARGOS o IRIDIUM. Suelen usarse como trazadores lagrangianos a profundidades deseadas (parking) a las que descienden tras los sucesivos afloramientos. Suele integrar CTDs y otros sensores como oxígeno disuelto o fluorescencia, sensores biogeoquímicos, etc. Su vida media útil es de unos cuatro años, pudiendo ser recuperados y rebaterizados para un nuevo uso.

La sensórica acoplable a los APEX es muy variada, siguiendo las directrices del Programa ARGOS (biogeoquímico, perfilador de corrientes…).
Otros perfiladores autónomos pueden navegar a la deriva o realizar sus perfiles verticales siempre en la misma localización. Es el caso del Wirewalker de Del Mar Oceanographic.

Se trata de un dispositivo diseñado para realizar desplazamientos verticales, a lo largo de un cable lastrado suspendido de una boya superficial, usando como único agente propulsor el oleaje (este vehículo se traslada verticalmente, pues, sin usar baterías). Los instrumentos montados en el Wirewalker pueden llevar sus propias fuentes de energía o bien usar un pack externo de baterías. Se trata de una solución elegante y eficiente para caracterizar la columna del agua de forma autónoma y minimizando el consumo energético.
Vehículos operados remotamente (ROV)
Los Romote Operated Vehicles (ROV), son vehículos cautivos, operados desde superficie a través de un cable. Su alcance es, por tanto, limitado, pero suponen una herramienta extremadamente útil para inspecciones de corto alcance. Se suelen alimentar a través del cable de control, aunque pueden disponer de baterías internas con las que realizar tareas concretas. Suelen presentar una potencia superior a los equipos autónomos por disponer de alimentación externa, vía corriente alterna de red o de un generador local.
Los ROV se suelen usar para inspecciones de infraestructuras sumergidas (obra y cascos de barco), toma de muestras (con brazos articulados), seguridad portuaria (monitorización mediante imagen), etc.
Tienen una gran ventaja si los comparamos con otros vehículos subacuáticos, ya que poseen flexibilidad a la hora de albergar gran cantidad y variedad de sensores. A su vez, pueden comunicarse con estaciones costeras y trasmitir los datos con un gran ancho de banda. Disponen de comunicación Wi-Fi (GPRS/UMTS), datalogger interno, soportes intercambiables para sensores, entre otras características. Son muy útiles para hacer batimetrías usando sónares de barrido lateral o de largo alcance, permitiéndoles auscultar zonas más profundas. Todo esto se une a su robustez, ya que están generalmente fabricados en fibra de carbono y materiales anticorrosión, siendo resistentes al agua de mar o dulce.

Las funciones típicas de los ROV son de inspección y mantenimiento, tanto a nivel comercial como científico. Los de inspección suelen albergar cámaras de video y foto de alta resolución. Si se requiere que hagan algo más, pueden disponer de brazos capaces de recoger muestras o manipular objetos.
Otras de sus propiedades es su maniobrabilidad. Para conseguirla se les equipa de varios motores dispuestos en todas sus caras, que les confieren también mayor potencia.
La oferta de ROVs se amplia continuamente y más empresas se lanzan a incluirlos en su cartera para dar soluciones a las demandas de los usuarios : desde el ocio a la industria petrolera de gran profundidad, pasando por investigación o usos militares. La gran variedad se refleja en su coste que va desde unos pocos cientos hasta varias decenas de miles de euros .
Referencias: